File Structure
SCOPE/
├── dataset/
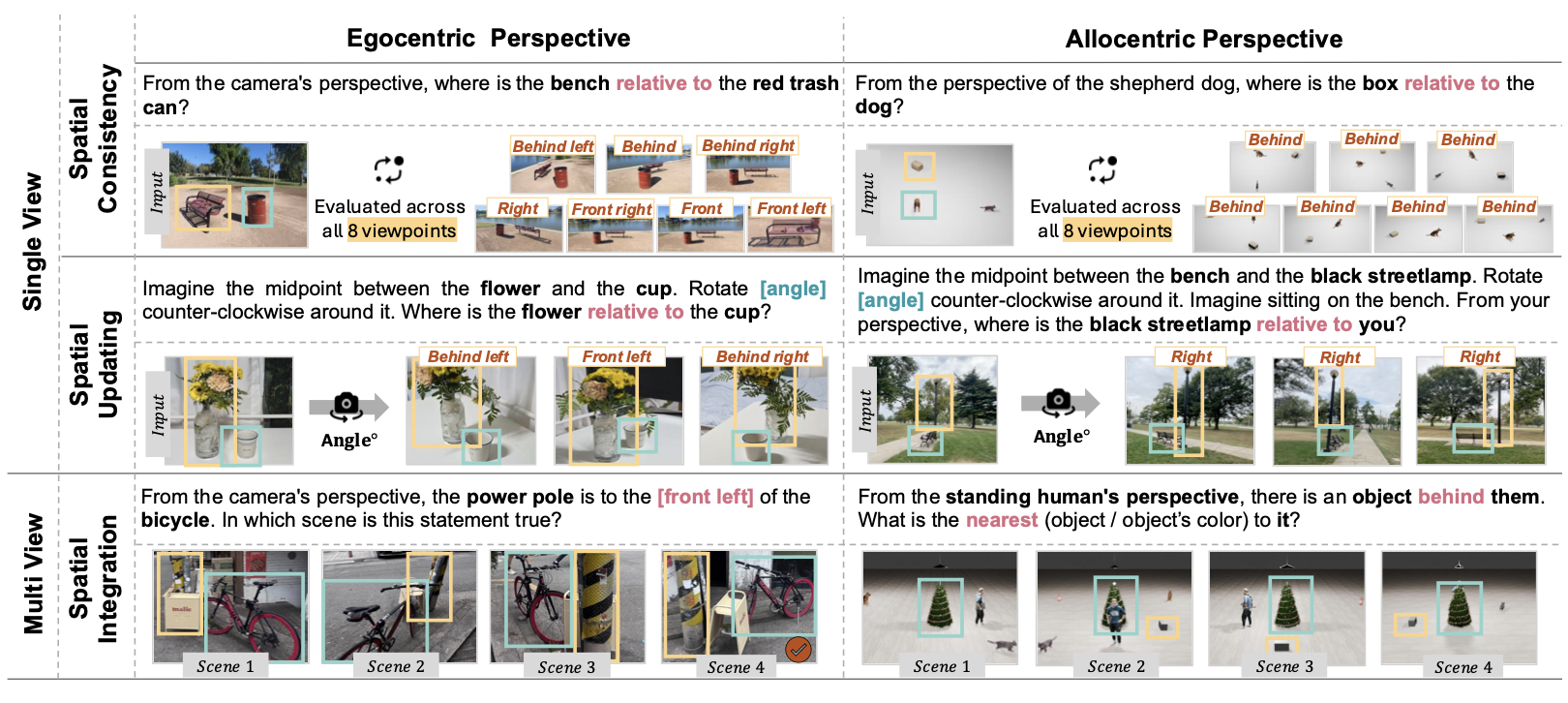
│ ├── task1.jsonl (Ego Spatial Consistency)
│ ├── task2.jsonl (Allo Spatial Consistency)
│ ├── task3.jsonl (Ego Spatial Updating)
│ ├── task4.jsonl (Ego Spatial Integration)
│ ├── task5.jsonl (Allo Spatial Updating)
│ ├── task6.jsonl (Allo Spatial Integration)
│ └── image/
│ ├── {scene_id}/
│ │ ├── frame_0deg.png
│ │ ├── frame_45deg.png
│ │ ├── ...
│ │ └── frame_315deg.png
│ └── occlusion/
│ └── {scene_id}/
│ └── frame_{deg}deg.png
├── evaluate/
│ ├── src/
│ └── scripts/
└── inference/
├── multi_integration/
└── viewpoint_invariance_and_spatial_updating/
Sample Entry
{
"image": "dl3dv_2/frame_0deg.png",
"camera_yaw_deg": 0,
"source_folder": "dl3dv_2",
"object_subject": "bench",
"object_reference": "trash can",
"question": "From the camera's perspective,
where is bench relative to trash can?",
"options": {
"A": "front",
"B": "behind",
"C": "left",
"D": "right"
},
"answer": "C",
"answer_text": "left",
"question_type": "mcq_4"
}